
|
协作机器人参数 |
|
|||
|
本体重量 |
82kg |
|
||
|
有效负载 |
20kg |
|
||
|
工作半径 |
1525mm |
|
||
|
最大臂展 |
1730mm |
|
||
|
额定电压 |
单相220v |
|
||
|
工作最大速度 |
1.0m/s |
|
||
|
关节活动范围 |
J1 |
±170° |
|
|
|
J2 |
±170° |
|
||
|
J3 |
±170° |
|
||
|
J4 |
±170° |
|
||
|
J5 |
±170° |
|
||
|
关节最大速度 |
J1/J2 |
89 °/s |
|
|
|
J3 |
158 °/s |
|
||
|
J4/J5 |
178 °/s |
|
||
|
控制箱 |
DI |
16路数字输入 |
|
|
|
DI/DO |
16路数字输出 |
|
||
|
重复定位精度 |
±0.1mm |
|
||
|
通讯方式 |
EtherCAT |
|
||
|
IP等级 |
IP54 |
|
||
|
温度范围 |
0-50℃ |
|
||
|
典型功耗 |
2000 W |
|
||
|
材质 |
铝,钢,橡胶,塑料 |
|
||
|
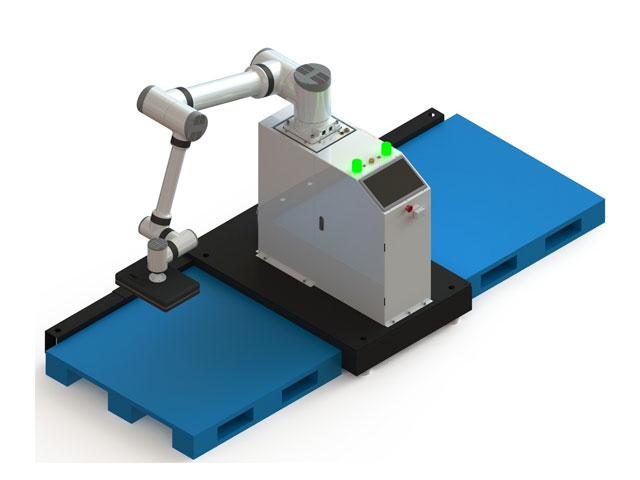
码垛工作站 |
||||
|
最大堆栈高度* |
升降最大可堆栈高度2100 mm(含托盘); 一般达1650mm(不含托盘) |
|||
|
最大栈板尺寸* |
1100mm×1100mm |
|||
|
可堆栈箱子尺寸* |
L(200-500)mm*W(150-450)mm*H(150-400)mm |
|||
|
最大容许负载 |
20kg |
|||
|
最快堆栈速度 |
最高每分钟堆叠8箱 |
|||
|
工作半径 |
最大工作半径1460mm |
|||
|
安全功能 |
可选配:安全光栅、安全围栏、安全感应地毯 |
|||
|
IP 等级 |
机器手臂IP54、夹爪及其余配件皆符合IP32 |
|||
|
界面 |
支援多项安全输入与输出, 包含紧急停止、 安全防护、管理者模式、厂家设置模式 |
|||
|
安全功能 |
紧急停止功能、预留外部安全接口(可通过I/O接口控制) |
|||
|
电源需求 |
AC220V 10A+ |
|||
|
气源需求 |
6kg |
|||
|
*最大堆栈高度指手臂在临界范围的单箱堆栈的使用情况 |
||||
|
码垛工作站组成 |
||||
|
主要组件 |
协作机器人 |
|||
|
操作与控制系统 |
||||
|
电控组件 |
触摸屏、控制器、直流电源套件与电缆线 |
|||
|
码垛专用软件 |
||||
|
机架构件 |
便捷移动式固定底座 |
|||
|
升降柱模组与拖链 |
||||
|
末端执行器 |
治具、吸盘 |
|||
|
气动组:空气处理组,电磁阀,工具末端的气管 |
||||
 扫一扫 加微信
扫一扫 加微信